retypd
Intro
钻研了半年多《Polymorphic Type Inference for Machine Code》论文。看完本文后还有任何相关的问题可以问我。
跨函数的类型传播算法,可以将库函数的类型传递到代码内部。即使没有库函数识别时,也可以识别处函数内的结构体信息。
资源
retypd 是一个非常高级的反编译类型恢复算法,技术领先程度足以超出其他论文好几年。有一篇论文: 《Polymorphic Type Inference for Machine Code》
资源:
背景
规则生成
- 复制操作:x := y,此时保守地认为,有可能是子类型赋值给了父类型变量:Y ⊑ X。
- 由复制操作带来的数据流,类型方向是父类型。子类型赋值给了父类型。
- 指针加载:x := *p,生成:P.load.σ32@0 ⊑ X 。
- 指针赋值:*q := y,生成 Y ⊑ Q.store.σ32@0 。
- 函数调用:如果有调用y := f(x),生成 X ⊑ F.in 和 F.out ⊑ Y 。
- icmp:两值进行比较的时候:1 bool类型是结果的子类型。2 两个被比较的值直接,随便生成一个子类型关系?
开发与使用
如何使用当前开源的代码呢?代码是一个python模块。当前开源的两个相关的使用代码有:retypd-ghidra-plugin和gtirb-ddisasm-retypd。
首先分析retypd-ghidra-plugin是如何使用retypd的。内部代码主要分为ghidra插件的java代码,和封装模块,ghidra_retypd_provider。Java代码部分通过Ghidra提供的API,从Ghidra的反编译器的IR中提取出相关的类型约束,提取为json文件。然后调用python封装模块读取并求解,结果也表示为json文件。然后Ghidra插件部分的java代码读取结果,并设置相应的类型。(注,无论是上次分析lua虚拟机,还是这次分析/bin/ls,花的时间特别久,半小时往上)
输入ghidra_retypd_provider的样例json约束文件如下。可以观察到,每个函数的约束单独分开,同时还包含一个call graph部分。
{
"language": "x86/little/64/default",
"constraints": {
"FUN_00109d00": [
"v_7456 ⊑ v_7780",
"v_997 ⊑ int64",
"v_1441 ⊑ FUN_00109b50.in_13",
"v_4504 ⊑ v_1242.store.σ8@0",
"v_6777 ⊑ FUN_00109b50.in_5",
"bool ⊑ v_542",
"v_2301 ⊑ null",
"v_7379.load.σ8@0*[nobound] ⊑ v_1441",
"v_4396 ⊑ v_1671.store.σ8@0*[nobound]",
"v_1188.load.σ8@0 ⊑ v_1191",
"v_1671.load.σ8@0*[nobound] ⊑ v_1720",
],
"FUN_00110e10": [
...
]
}
"callgraph": {
"FUN_00109d00": [
"FUN_001158c0",
"FUN_00115920",
"FUN_00109b50",
"FUN_00115b30"
],
"FUN_00110e10": [
"strcmp",
"strlen",
"FUN_001158c0",
"getgrnam",
"strcpy"
],
...
}
}
输出ghidra_retypd_provider的样例json结果文件如下。可以观察到,包含两种类型的结果,分别是结构体和函数。结构体包含内部的成员及类型。函数块描述了函数的各个参数的类型。在这里的自定义encoder中定义了转json的函数。
这一点其实很奇怪,似乎该插件关注的核心是函数参数类型。这里后续解析和类型设置也说明了这一点。
[
{
"type": "struct",
"name": "struct_545",
"fields": [
{
"name": "field_0",
"type": "char1_t*",
"offset": 0
},
{
"name": "field_1",
"type": "char1_t[4]",
"offset": 168
}
]
},
{
"type": "function",
"name": "function_260",
"params": [
{
"index": 0,
"type": "char1_t[4]"
}
],
"ret": "char1_t[0]"
},
...
]
接着我们看ghidra_retypd_provider内部是如何调用retypd的。
-
使用
SchemaParser.parse_constraint解析每个约束项(SubtypeConstraint),它保存子类型关系左右两边的变量(DerivedTypeVariable)。每个函数的约束项放到一个集合里,再按函数名字放到map里,然后构建Program:program = Program( CLattice(), {}, parsed_constraints, callgraph, )这里
parsed_constraints就是准备好的那个map。callgraph都不用动,就是Dict[str, List[str]]。前两个参数分别是types: Lattice[DerivedTypeVariable]和global_vars: Iterable[MaybeVar]。 -
使用Solver去求解约束:
config = SolverConfig(top_down_propagation=True) solver = Solver(program, config, verbose=LogLevel.DEBUG) _, sketches = solver()查看solver的
__call__方法,可以发现返回类型是Dict[DerivedTypeVariable, ConstraintSet]和Dict[DerivedTypeVariable, Sketch]。 -
传入
CTypeGenerator,得到最终的类型结果。gen = CTypeGenerator( sketches, CLattice(), CLatticeCTypes(), int_size, pointer_size, ) return list(gen().values())CTypeGenerator的__call__方法的返回类型是Dict[DerivedTypeVariable, CType]。
根据这里,每个规则大致就是var1 ⊑ var2或者var1 <= var2,然后两边的变量就是DerivedTypeVariable类型的。因此,上面结果里返回的map其实就能够用来查每个变量的类型。
S-Pointer and S-Field⊕/⊖ 通过搜索代码,可以得知,至少在retypd-ghidra-plugin和gtirb-ddisasm-retypd中是没有和这个相关的规则的生成的。
retypd ghidra 插件
在我的fork仓库里可以直接下载到构建好的插件,修改版Ghidra,以及docker镜像。同时提供了给retypd的样例输入和输出。
通过修改 GhidraRetypd.zip中的extension.properties,可以绕过ghidra插件安装时的版本检查
version=10.2.3
安装Ghidra插件:
- 打开 Ghidra 软件,点击 "File" 菜单,选择 "Install Extensions" 选项。
- 在弹出的 "Install Extensions" 窗口中,点击 "Browse" 按钮选择你要安装的扩展程序。
- 选中你要安装的扩展程序文件(通常是一个 zip 压缩文件),然后点击 "Open" 按钮。
- 点击 "OK" 按钮开始安装扩展程序。在安装过程中,Ghidra 软件会自动解压缩扩展程序文件,并将它们安装到正确的目录中。
- 安装完成后,重启 Ghidra。
算法详解
- 首先阅读这个PPT和这个论文《Saturation algorithms for model-checking pushdown systems》,学会B¨uchi发现, Caucal提出的这个saturation算法。
- 然后阅读论文,学习其中基于saturation算法改进的部分。
自动机基础 Saturation algorithms
资料:
- 《Pushdown systems》了解下推自动机
- 《Saturation algorithms for model-checking pushdown systems》了解Saturation algorithms相关的背景概念。
有两个重要结论:
- 下推系统可达的栈内容形成了一个正则语言,因此可以表示为有限状态自动机。但是最初提出的算法是指数级的。后面有人提出了多项式级的算法,核心思想就是引入一个saturation process,转换被逐渐地加入有限自动机。(这个结论没有被retypd使用)
- 下推系统定义了配置(状态加栈字符串)之间的转换关系,可以多项式时间内构建一个带输出的有限状态自动机(transducer)识别这些转换关系。(retypd使用的结论)
有限自动机
- $\Sigma$ 是自动机的字符集。$\Sigma^{*}$ 是字符串的集合。 $\Gamma^{\leq n}$ 是长度最多为n的字符串集合。
- 一个在字符集 $\Sigma$ 上的自动机 $\mathcal{A}$ 是一个元组: $(\mathbb{S},\mathcal{I},\mathcal{F},\delta)$ 分别代表有限的状态集合,初始状态集合,最终状态集合,转换规则集合 $\delta \subseteq \mathbb{S} \times \Sigma \times \mathbb{S}$ 表示从一个状态遇到一个字符,转换到另外一个状态。
- 有时会把字符集写进来 $(\mathbb{S},\Sigma,\mathcal{I},\mathcal{F},\delta)$ 变成五元组
- $s \overset{a}{\underset{\mathcal{A}}{\longrightarrow}} t$ 表示自动机 $\mathcal{A}$ 有这样一个转换 $(s,a,t)$
- $s \overset{w}{\underset{\mathcal{A}}{\Longrightarrow}} t$ 表示自动机读入字符串w之后可以转换到t。
下推系统 pushdown system 与 P-自动机
和下推自动机的区别:pushdown system是自动机的简化版本。当我们用PDS建模程序的时候,有时不太关注读入和识别字符,而是关注栈状态的转移。
和自动机的区别在于没有识别字符串这种概念。自动机一般只能用来识别字符串,有初始态,终止态,遇到某个字符的时候触发转换规则。这里的下推系统则不是识别字符串的,即转换规则里不需要读入字符,直接改变状态和栈内容。这里下推系统直接主要关注栈上的内容字符串。
一个下推系统是四元组 $(Q,\Gamma,\bot,\Delta)$
- $Q$ 是有限的控制状态的集合
- $\Gamma$ 是有限的栈字符集
- $\bot \in \Gamma$ 是一个特殊的底部栈字符
- $\Delta \subseteq (Q \times \Gamma) \times (Q \times \Gamma^{\leq 2})$ 是转换的集合。表示在一个状态从栈上弹出一个字符,转换到另外一个状态并压入一个字符串。
- Configuration表示系统状态,是 当前状态 $\in Q$ 和 当前栈字符串 $\in \Gamma^{*}$ 的二元组。
- 不考虑弹出超过栈底的情况。所以有时会引入特殊底部栈字符,然后要求规则不会把这个符号弹出来。
Pushdown system (PDS)可以用来分析程序
- 程序表示
- 状态Q保存程序的全局变量
- 栈反映程序执行的调用栈
- 栈上字符编码程序局部变量:比如编码为 当前program counter 和 局部变量的二元组。
- 一些例子
- 状态 $pAw$, 这里 $p$ 表示状态,代表全局变量, $Aw$ 表示栈。其中 $A$ 表示当前的PC和局部变量,w表示调用栈中,被“暂停”执行的程序状态,包括返回地址和局部变量情况。
- 状态转换 $pA \rightarrow qB$ 表示执行一个普通语句。
- 全局变量可能发生修改,从 $p$ 变成 $q$ ,
- 栈深度不变,但是从A变成B,表示当前PC和局部变量发生了变化。
- 状态转换 $pA \rightarrow qBC$ 表示函数调用
- 栈深度增加了,B里面包含了返回地址以及调用者的局部变量状态。现在压入了被调用者的栈。
- $pA \rightarrow q\epsilon$ 表示函数返回
- 栈上弹出了一个字符,表示弹出了一个调用栈。
PDS的可达性问题
给定一个PDS和两个configuration $c,c'$,是否能从 $c$ 走到 $c'$ 状态?
$$ { w \in \Gamma^{*} \mid \exists q \in Q, (q_{0},\bot) \Rightarrow (q,w) } $$
即求出这样一个集合,从起始状态 $(q_{0},\bot)$ 出发能推导到的所有状态 $(q,w)$ (这里状态 $q \in Q$ 任意),其中字符串w组成的集合。
一个非常重要的结论是,这里可达的字符串集合形成了正则语言。 这意味着函数调用时的状态转换可以用一个有限状态自动机表示。
PDS的configuration的正则性:
- 背景:众所周知,能被确定有限状态自动机识别的语言是正则(regular)语言。而说到语言,我们会想到根据语法生成的规则,最后推导出很多可以被接受的字符串,但是语言本质也就是一种无限的字符串的集合。
- 如果是有限的话,直接对每个字符串用or连接就完全匹配了。所以一般讨论的都是无限的字符串集合。
- 定义1:如果某个配置集合 $C$ 是正则的,那么对任意的状态 $p \in Q$ (即不管状态),在这个配置集合里面的所有字符串w构成的集合, ${ w \in \Gamma^{*} \mid (p,w) \in C}$ 是正则的。即栈状态构成正则语言。
- 简单来说,不管state,如果栈上字符的集合构成正则的语言,则这个configuration集合是正则的。
- 定理1,初始状态可达的配置集合的正则性:
- 定义:初始配置:任意状态,但是栈为空(仅有 $\bot$ 符号)的配置
- 任意pushdown system,从初始配置出发,可达的配置是正则的。
- 定理2:后推闭包的正则性:给定一个正则配置集合C,基于自动机规则任意后推形成的闭包集合也是正则的。
- 写作:$Post^*_{P}(C) = { c' \mid \exists c \in C, c \underset{P}{\Longrightarrow} c' }$ 从任意的C中配置开始,在自动机P下能推导出c',则c'属于集合。
- 这一定理能从定理1推出:构建一个新自动机P',增加很多新的state,使得当前配置集合都是初始配置。这里定理里的后推可得到的配置集合其实就是可达的配置集合。
- 倒推闭包的正则性:正则集合的倒推集合,即另外一个配置集合Pre*(C),能够推理得到当前集合C。当前集合是正则的,则Pre*(C)也是正则的。
- 原因:有时候想要基于程序的错误状态,倒退前面的可达状态。
- 证明:思想是,构建新的自动机P',规则和P是反着来的。
- 如果P有个规则是 $qA \rightarrow p$ 即弹出了字符A。我们P'增加反着来,压入字符A的规则 $pX \rightarrow qAX$。即对于任意字符X,都允许压入AX。
- 如果P有个规则是 $qA \rightarrow pBC$ 弹出A压入BC。则我们需要增加两个规则。
- $pB \rightarrow r_{(C,q,A)}$
- $r_{(C,q,A)} C \rightarrow q A$
- 直接插入规则的问题在于,下推自动机左边一般只能匹配一个栈顶字符,右边则可以为空,也可以压入两个字符。这里我们需要考虑同时按顺序存在BC字符的情况。
- 借助中间状态 $r_{(C,q,A)}$ 我们
- 一致性:如果在P中有两个状态可以互推,当且仅当我们P'中这两个状态可以反着互推。而且P'满足上面定理的要求,然后应用上面正推的定理,成功证明反推定理。
和retypd的PDS对应:我们构建的PDS表达的是子类型之间的转换关系。但是实际构建出来可能存在很多初始状态不可达的序列。例如如果有规则 $A.load \sqsubseteq B$ 我们增加初始状态的转换,使得初始状态可达 (A/B, $\bot$) 的配置。但是规则并不允许 $(A, \bot) \rightarrow (A, .load)$ ,否则存在子类型关系 $A \sqsubseteq A.load$。也因此,这里构建的自动机没有用在retypd中。
PDS对应的自动机
有一个PDS $\mathcal{P}=(P, \Gamma, \Delta)$,我们对应有一个有限自动机 $\mathcal{A}=(Q, \Gamma, P, T, F)$
- PDS的栈字符集 $\Gamma$ 被用作有限自动机的字符集。PDS栈字符原本用来表示局部变量和PC。
- PDS的控制状态(表示全局变量),被用作有限自动机的初始状态。
- 我们称,有限自动机接受配置 $pw$ ,如果自动机从状态p开始,接受字符串w之后能停止在终结态。而且对应每个PDS都能构造出这样的自动机。
- 直观上理解:对任意的state(代表了程序的全局变量状态),此时可能的栈情况是什么样的?这些所有可能的栈情况可以用一个有限自动机来表达。
- 上面提到,不考虑状态,单把栈上字符串拿出来,形成的也是正则语言。这里其实表达的是一个意思。每个configuration的状态作为初始状态,然后存在一个P-有限自动机匹配栈上的内容,其实就是说明了栈上形成的是正则语言。
Pre(S)的Saturation Algorithm
- 相关符号总结
- $\Delta$: pushdown system的下推规则
- $\delta$: P-自动机的状态推理规则。后面会不断增加规则,构成一个递增的规则序列。
- $Q$: pushdown system的状态集合,也是P-自动机的初始状态
- $\mathcal{F}$: P-自动机的终止状态集合
- $\mathcal{A}$: P-自动机。包括状态集合 $\mathbb{S}$, 初始状态 $Q$, 推理规则 $\delta$ 和终止状态 $\mathcal{F}$。
- $\mathcal{L}(\mathcal{A})$: 表示A接受的语言。
- $\mathcal{B}$: 需要构建的新自动机,接受 $Pre^{*}_P (\mathcal{L}(\mathcal{A}))$
- Saturation Algorithm算法
-
前提:已知一个下推系统 $P=(Q,\Gamma,\bot,\Delta)$ ,和对应的P-自动机 $\mathcal{A}=(\mathbb{S},Q,\delta,\mathcal{F})$
-
目标:构建出一个新的自动机 $\mathcal{B}$ 接受语言 $Pre^{*}_P (\mathcal{L}(\mathcal{A}))$
-
过程:构建一个自动机的序列 $(\mathcal{A}{i}){i \in [0,N]}$
- 其中其他部分都是相同的,状态数量是相同的,只有转换规则 $\delta_i$ 不同。
- 保证转换规则只会增加新的规则: $i \in [0,N-1]$, $\delta_{i} \subseteq \delta_{i+1}$
- 最后转换规则会收敛,达到不动点: $\delta_{i+1}=\delta_{i}$
- 每次至少增加一个规则,因此程序最多走 $|Q|^{2} |\Gamma|$ 步
- 作为一个有限状态自动机,这里只对Q状态增加边,每两个状态之间最多 $|\Gamma|$ 个规则。
-
算法:如果有一个规则 $pA \rightarrow qw$ ,同时现在的P-自动机存在一个路径 $q \overset{w}{\underset{\mathcal{A}_{i}}{\Longrightarrow}} s$ 我们给P-自动机增加一个新的转换规则 $p \xrightarrow[]{A} s$
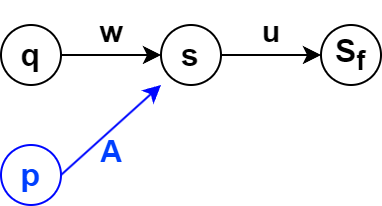
p Au -> q wu。原有自动机为黑色部分,u代表未知任意字符串,即代表的是路径,内部省略了具体的其他节点。意味着从状态为q栈为空的状态,能够接受一个字符串wu。然后我们新增了这样一条规则,使得状态为p,字符串为Au也被接受了。
规则的构建使得,某个下推系统的前驱规则的节点被覆盖到了。而最后目的自动机 $\mathcal{B}$ 由于达到了不动点,因此关于下推系统P的前驱规则封闭。
-
证明过程的不变量:在这个自动机转换规则的序列中,存在一些始终为真的条件。如果自动机存在转换规则 $p \xrightarrow[]{A} s$ ,那么以下两个性质始终满足满足。
- 如果状态s属于下推系统P的状态:在下推系统P中存在规则 $pA \overset{}{\underset{P}{\Longrightarrow}} s$。这是一个弹出栈字符的规则。
- 如果状态s属于其他状态,即不属于下推系统P的状态:对于任何从状态s出发能被接受的字符串u,配置 $(p,Au)$ 属于 $Pre^{*}_P (\mathcal{L}(\mathcal{A}))$
- 从这个不变关系,可以推出, $\mathcal{L}(\mathcal{A}_i) \subseteq Pre^{}_P (\mathcal{L}(\mathcal{A}))$ ,即每个A的语言都是我们目标的子集。 特别地, $\mathcal{L}(\mathcal{B}) \subseteq Pre^{}_P (\mathcal{L}(\mathcal{A}))$ 最终迭代的不动点也是这样。
-
最小关系:我们如果只关注状态在Q中(下推系统的状态)的部分,那么关系只在 $(Q \times {\varepsilon}) \times (Q \times \Gamma)$ 上被添加 1. 左边都是初始状态; 2. 转换规则都是接受了一个字符。 这里增加的关系可以被看作是一个最小关系 $\mathcal{R}$
- $pA ; \mathcal{R} ; q$ 如果存在规则 $pA \rightarrow q$
- $pA ; \mathcal{R} ; q$ 如果 $rB ; \mathcal{R} ; q$ 并且 $pA \rightarrow rB$ 在规则中。
- 这里关系 $\mathcal{R}$ 似乎会对每个带栈字符的状态创建一个无字符的对应状态?比如这里为 $rB$ 引入中间状态
- $pA ; \mathcal{R} ; q$ 如果存在规则 $pA \rightarrow rBC$,并且存在状态 $s\in Q$,关系 $rB ; \mathcal{R} ; s$ 和 $sC ; \mathcal{R} ; q$
- 这里 $q$ 仿佛直接代表了 $rBC$
-
描述派生(可达)关系的 Transducer
基础概念:
-
Finite State Transducer 其实就是带有输出的有限状态自动机(finite state automaton)。
-
派生关系 $Deriv_{P}$:描述任意两个字符串之间的关系: $Deriv_{P} ={ (u,v) \in \Gamma^{*} \mid (q_{0},u) \overset{}{\underset{P}{\Longrightarrow}} (q_{f},v) }.$
- $Deriv_{P} \subseteq \Gamma^{} \times \Gamma^{}$ 。是字符串之间的关系。
-
操作:$A_{+}$ 表示压入单个符号的操作 push A($A \in \Gamma$ 是字符)。 $A_{-}$ 同理。
- 操作集合 $\Gamma_{+}={ A_{+} \mid A \in \Gamma}$ push操作的集合, $\Gamma_{-}$ 同理。 $\overline{\Gamma}=\Gamma_{+} \cup \Gamma_{-}$ 表示两个的并集。
- 操作序列: $\alpha=\alpha_{1} \ldots \alpha_{n} \in \overline{\Gamma}^{*}$ 表示一系列操作。
- 例如, $pA \rightarrow qBC$ 的操作序列是 $A_{-}C_{+}B_{+}$
- 操作转换关系: $u \overset{\alpha}{\underset{}{\leadsto}} v$ 表示栈状态 $u \in \Gamma^{*}$ 在操作 $\alpha$ 下变成了栈状态 $v$。
- non-productive序列:无法被应用的栈序列,常常是这种 $B_{+} C_{-}$ 先push再pop一个不同符号的序列,刚压入B,怎么可能栈顶弹出C呢?
- 就像下面对比图先走橙色边再走蓝色边一样。
-
对比自动机和transducer
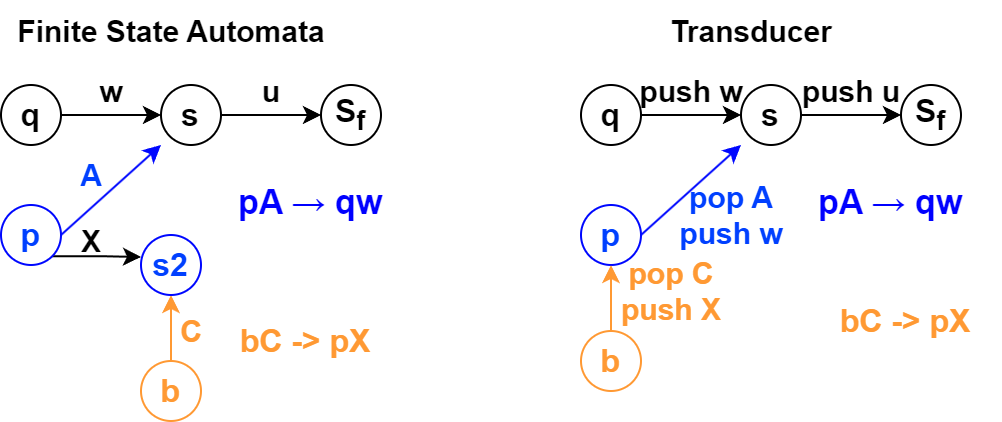
这里可以看到,transducer的状态和PDS是完全对应的,前面的自动机则仅是初始状态和PDS相同,只有栈为空的时候才对应PDS对应的状态。
Transducer 每条边上也只能push或pop一个字符,这里是简略写法,隐藏了中间的状态。但是是否打破了Transducer和PDS状态的对应关系?并没有,如果要求PDS每次也只能增加或者减少一个栈字符,则两边还是对应的。
-
行为集合 $Behaviour_{P}$ 表示下推系统P,不管是否non-productive,可能走出的所有栈操作序列的集合。
- 即我现在只需要管状态转换,不需要管栈操作的应用。
- 即画出上面的转换图,然后随便沿着边走
-
$Behaviour_{P}$ 和 $Deriv_{P}$ 的关系:对于任何在行为集合的操作序列, $\alpha \in Behaviour_{P}$ , 两个字符串属于派生关系集合 $(u,v) \in Deriv_{P}$ 当且仅当 这两个字符串存在操作关系 $u \overset{\alpha}{\underset{}{\leadsto}} v$ 。
- 然而这个定义不太行,因为 (1) $Behaviour_{P}$ 有很多不合法的序列。(2) 存在刚push就pop的冗余序列,如 $A_{-} B_{+} A_{+} A_{-} C_{+} C_{-}=A_{-} B_{+}$ 。
-
简化关系 $\mapsto$ :表示一个栈操作序列被简化为另外一个栈操作序列。消除了上面的这种刚push就pop的冗余行为
- 例如 $B_{-}A_{+}A_{-}C_{+} \mapsto B_{-}C_{+}$
-
操作序列集合在简化操作下维持正则性:如果一个操作序列集合R内的每个操作都被 $\mapsto$ 简化,那么新的集合 $Red(R) = { Red(\alpha) \mid \alpha \in R }$ 也是正则的
-
操作序列自动机的简化算法: $Red(R)$ 能在 $\mathcal{O}(|\mathcal{A}|^{3})$ 的复杂度构建出来。
-
简化并移除non-productive序列的操作集合 $RP_{P}$
- 移除non-productive序列:简化后很容易识别,直接扫描找先push再pop的序列。因为如果push的字符和pop的字符不同则不合法,相同则说明化简没有结束。
- 性质:可以推出里面的序列必然只会先pop再push。
-
最终的结论:
- $Deriv_{P}$ 的关系 $(w_{1},w_{2})$ 对应到transducer 必然是,找出两个串的公共后缀,然后先pop w1的前缀,然后push w2的前缀。
- $Deriv_{P}$ 对应的 Transducer 可以在多项式时间内被构建出来。
核心在于,将状态转换改为了一个push pop栈的序列。即,如果有一个 $pA \rightarrow rw$ 规则,那么我们这里构建一个序列:pop A,push ...(构成w的几个字符)。表示栈上的变化关系。
然后使用饱和(Saturation)算法。这里需要每条边上的操作只能压入或者弹出单个字符。即找到两个路径上能化简的状态,然后直接连过去,标上化简后的操作序列。
这里的饱和(Saturation)算法才是后面retypd使用的。
retypd 基础符号
使用的符号
- $\mathcal{V}$: 类型变量的集合
- 在这个集合里包含一系列类型常量,作为一种符号描述。这些类型常量可能形成一个lattice,但是我们不解释它们。
- $\Sigma$: 字段标签 field label。不一定是有限的。主要的符号如下:
- $\mathsf{.in}_L$ 函数在位置L的输入
- $\mathsf{.out}_L$ 函数在L位置的输出
- $\mathsf{.load}$ 可读的指针
- $\mathsf{.store}$ 可写的指针
- $.\sigma\mathsf{N@k}$ 在偏移k处有一个N bit的成员。
- 函数 $\langle \cdot \rangle : \Sigma \to { \oplus, \ominus }$: 从结构体label映射到 ${ \oplus, \ominus }$ 表示variance,协变和逆变属性
- 派生的类型变量 derived type variable (定义3.1):形为 $\alpha w$ ,其中类型变量 $\alpha \in \mathcal{V}$ and 字段标签 $w \in \Sigma^*$.
- 标签 $\ell$ 的variance (定义3.2),指的是前面的类型变量的类型如果发生变化时,带标签的派生类型变量的variance的变化方向。 $\alpha.\ell$ 和 $\beta.\ell$ 中,如果 $\alpha$ 是 $\beta$ 的子类型。
- 约束 $c$ (定义3.3)有两种形式。约束的集合用 $\mathcal{C}$ 表示
- 存在形式: (派生)类型变量X存在
- 子类型形式:(派生)类型变量X是Y的子类型。
- 约束的推导 $\mathcal{C} \vdash c$ 表示约束能从原约束集合中,由那些规则派生出来。
- 约束中的自由变量定义 $\exists \tau . \mathcal{C}$ 表示,存在变量 $\tau$ 满足了约束集合。
- Type Scheme类型方案,表示一个泛型的函数。 $\forall{\overline{\alpha}}.{\mathcal{C}}\Rightarrow{\beta}$ 表示在约束C的条件下,带有模板变量集合 $\overline{\alpha}$ 的泛型类型 $\beta$
- 仅增加约束: $\forall \tau . C \Rightarrow \tau$ 表示仅对类型 $\tau$ 增加约束。
- 例如 $\forall \tau . (\tau.\mathsf{in}.\mathsf{load}.\sigma\mathsf{32@4} \sqsubseteq \tau.\mathsf{out}) \Rightarrow \tau$ 表示函数返回了参数在4字节offset位置的成员。
- 和约束的关系:基本是对应的。可以想象为我们主要关注约束,任何类型方案都可以理解为,声明一些通配符变量,然后定义一些约束。例如 $\forall \alpha . (\exists \tau . \mathcal{C}) \Rightarrow \alpha$ 。通过引入新的类型变量,可以让最右侧总是等于单个变量。如果能把约束里每个类型变量解出来,那么这个泛型也很容易得到。
- 和sketch的关系。通过inferShapes算法将约束求解为变量映射到sketch的树/自动机结构。
- 仅增加约束: $\forall \tau . C \Rightarrow \tau$ 表示仅对类型 $\tau$ 增加约束。
常见术语
- pushdown system: 在基本的自动机的基础上,额外增加了一个栈结构。
- non-structural subtyping: 即子类型关系不一定非要结构完全相同(在structural subtyping中只能叶子节点不同)。尤其是在有结构体和对象这种情况。见"Type Inference with Non-structural Subtyping"
规约规则
- T-Left/T-Right/T-Prefix: 如果存在约束 $\alpha \sqsubseteq \beta$ ,则 $\alpha$ 和 $\beta$ 存在。如果存在一个带field label的派生变量,则原始变量存在。
- 这意味着在算法中我们在访问约束时会创建对应变量节点。
- T-InheritL / T-InheritR: 子类型能安全代换父类型。父类型如果能带一个field label,则子类型带有相同的field label的派生变量也存在。
- S-Refl: 反射性,自己是自己的子类型。
- S-Field$_\oplus$ / S-Field$_\ominus$: 如果field label的variance是协变 $\oplus$,则原变量子类型关系在带上标签后保持。否则反过来。
- S-Pointer: 指针存入的类型是取出的子类型。
sketches 约束的求解结果被表示为sketches。每个value关联上一个sketch,包含该value的所有能力,即能否被store,能否访问指定的偏移。同时sketch还包含一个可自定义的lattice,用来传播类似于typedef这种类型。
我们分析的不是具体的程序中的变量,而是他们的类型和类型之间的关系。因为复杂的约束关系,我们会把类型再设为一个类型变量,称为DataTypeVariable,DTV。
什么是Sketches:一个派生类型变量DTV,可能有各种各样的能力,比如可以在offset为4的地方load出一个四字节的值 (.load.σ32@4)。首先可以遍历所有的约束关系,比如v_4504 ⊑ v_1242.store.σ8@0,对每个关系单独看两边的变量,然后看比如v_1242是否被直接这样取过offset,然后把这些操作收集起来。但是这样还不够,因为可能因为约束的存在,其他变量能做的操作,它因为约束,应该也能做。这些都求解出来,得到的数据结构就是一个Sketch。
一个Sketch才是真正直接代表一个具体的类型。是一个树状的类型结构。这个树的边上标记了field label,节点上标记了类型lattice上的元素。
基于程序操作的约束生成
- 变量复制/赋值:要么两边类型相同,要么根据安全代换原则,子类型被赋值为父类型。
- 指针读取:增加field label。
- 指针的读和写能力分开考虑。子类型方面特殊处理。
- 函数调用:参数父类型,返回值子类型。
- 单独的类型变量规则是structural的,即子类型和父类型的能力必须一致。但是在函数调用时,可以遗忘一些能力。
规约算法:概述(Section 5)
约束的简化
类型,以及函数的类型到底应该怎么表示?
- 格表示的类型:对于单个固定大小的基本类型,可以使用lattice结构以及一个偏序关系表示类型。子类型为格上的偏序关系
- 对于复杂的具有能力的类型,比如访问某个偏移字段的能力,加载出值的能力,则类似结构体的子类型关系,子类型允许具有更多能力,安全代换父类型。
- 函数的类型则涉及到泛型的类型方案的表示 $\forall{\overline{\alpha}}.,{C}!\Rightarrow!{\tau}$ 。为函数的输入和输出类型创建类型变量,然后得到一个变量的最小约束集合表示这个函数的类型。
- 例如通用的恒等函数,直接将参数返回,表示为,对任意的类型X,返回值的类型也是X。对应我们的表示可能是 $F.in \sqsubseteq F.out$
- PDS = (未化简,或者简化后的)约束 = 类型方案 type scheme
我们为什么要简化约束? 为了减少无用的自由变量,降低约束集的增长率。令 $\mathcal{C}$ 表示由抽象解释生成的过程的约束集,并且 $\overline{\alpha}$ 是 $\mathcal{C}$ 中的自由类型变量集。我们其实已经可以使用 $\forall{\overline{\alpha}}.,{\mathcal{C}}!\Rightarrow!{\tau}$ 作为过程类型方案中的约束集,因为合法调用 $f$ 时使用的输入和输出类型显然是满足 $\mathcal{C}$ 的。
然而,实际上我们不能直接使用这个约束集,因为这会导致在嵌套过程中产生很多无用的自由变量,并且约束集的增长率很高。如果一个函数没有调用其他函数,则确实约束集就自己。但是当函数调用别人,其他函数又调用更其他的函数,此时每次为一个函数推理类型时,就会牵涉进来所有这些涉及的函数的约束。因此化简约束是非常有必要的(TODO,是否可以根据约束的性质,判断它是否需要牵涉进来?)。
这个简化算法的输入是,从一个函数的推断得到的一个类型方案 $\forall{\overline{\alpha}}.,{C}!\Rightarrow!{\tau}$ (包括自由类型变量,约束,和泛型),并创建一个较小的约束集 $\mathcal{C}'$,使得任何由 $\mathcal{C}$ 对 $\tau$ 的约束也被 $\mathcal{C}'$ 所蕴含。
相反,我们寻求生成一个简化的约束集 $\mathcal{C}'$,使得如果 $c$ 是一个“有趣”的约束,并且 $\mathcal{C} ;\vdash; c$,那么 $\mathcal{C}' ;\vdash; c$ 也同样成立。但什么让一个约束变得有趣呢?
- 能力约束,表示某个dtv有某个field label
- 递归类型约束: $\tau.u {;\sqsubseteq;} \tau.v$
- 涉及常量类型的约束: $\tau.u {;\sqsubseteq;} \overline{\kappa}$ 或者 $\overline{\kappa} {;\sqsubseteq;} \tau.u$ 其中 $\overline{\kappa}$ 是类型常量.
Roadmap
- (A.)收集文字格式的初始约束,构建初始图。插入外部函数已知的参数类型。
- (F.1)约束简化算法。简化后的约束就是type schemes。这里对每个强连通分量后序遍历进行处理,处理完的分量内的type schemes保存下来,等待实例化。
- 基于约束集合构建初始图。子类型关系增加标记为1的边。对标签增加和减少的关系,增加对应push/pop的边。
- 比如对于dtv
F.in_a.load.off_4_size_8构建一系列图节点F -> F.in_a -> ... -> F.in_a.load.off_4_size_8。 - 对于约束关系两边的dtv,连接边(边上标记1)。
- 比如对于dtv
- 运行Saturation算法,将
push α -> 1 -> pop α这种边序列增加shortcut边。应用S-Pointer的实例化规则
- 基于约束集合构建初始图。子类型关系增加标记为1的边。对标签增加和减少的关系,增加对应push/pop的边。
- Step 3: Identify the “externally-visible” type variables and constants; call that set E.
- Step 4: Use Tarjan’s path-expression algorithm to describe all paths that start and end in E but only travel through E c.
- Step 5: Intersect the path expressions with the language (recall _)*(forget _)*.
- Step 6: Interpret the resulting language as a regular set of subtype constraints. (“forgets” on the right, “recalls” on the left)
- (F.2)构建sketches(为每个类型变量,比如函数类型)(自底向上遍历call graph的顺序),同时细化具体类型。
- (4.3)最后转换sketches到C类型。
类型恢复本质上是三层分析的叠加:
- 指针和数字类型的区分。
- 指针能力分析。
- 自定义的typedef常量类型传播。
本质上,retypd在前两者里用的是快速的steensgaard的指针分析,在最后这层的分析上用的是Anderson的指针分析算法。
retypd为什么不直接采用steensgaard的类型恢复?因为常量用不了,merge了直接变成父类型,基本无法传播自定义的typedef类型。。
对于每个SCC看作按需分析。每个SCC能够简化算法计算出对应的summary。
无约束的下推系统 Unconstrained Pushdown Systems
无约束的含义:TODO。可能是表示没有限制栈符号和转换规则的有限性?
核心思路: 下推系统 $\mathcal{P}_\mathcal{C}$ 的转换序列,可以直接对应上基于约束集合 $\mathcal{C}$ 上的子类型推导判断的推导树。
定义:一个无约束下推系统是由三个部分组成的元组 $\mathcal{P} = (\mathcal{V}, \Sigma, \Delta)$,其中 $\mathcal{V}$ 是控制位置的集合,$\Sigma$ 是栈符号的集合,而 $\Delta$ 是包含在 $(\mathcal{V} \times \Sigma^)^2$ 内的(可能无限)转换规则的集合。转换规则表示为 $\langle X; u \rangle \hookrightarrow \langle Y;v\rangle$,其中 $X,Y \in \mathcal{V}$ 且 $u,v \in \Sigma^$。我们定义配置的集合为 $\mathcal{V} \times \Sigma^*$。在配置 $(p,w)$ 中,$p$ 称为控制状态,$w$ 称为栈状态。
注意到,我们既不要求栈符号的集合也不要求转换规则的集合是有限的。这种自由度是为了模拟推导规则 S-Pointer, 正如图3的推导规则 S-Pointer 所示,它对应于一个无限的转换规则集。
为什么要用下推系统? 下推系统能很好地反映类型关系关于能力的传递关系,反映在下推系统上就是后缀子串的关系。
- 转换关系定义:一个无约束的下推系统 $\mathcal{P}$ 确定了一个转换关系 $\longrightarrow$ 在配置集合上: $(X,w) \longrightarrow (Y,w')$ 如果存在一个后缀 $s$ 和一个规则 $\langle {X}; {u} \rangle \hookrightarrow \langle {Y}; {v} \rangle$,使得 $w = us$ 和 $w' = vs$。$\longrightarrow$ 的传递闭包表示为 $\stackrel{*}{\longrightarrow}$。
- 这里的公共后缀s,就可以想象为类型的能力。比如各种偏移里的字段。然后前缀类型变量,比如两个结构体类型,如果符合子类型关系,则对应的访问相同的字段得到的类型变量,则也存在子类型关系。
有了这个定义,我们可以陈述我们简化算法背后的主要定理。这里一个类型对应一个 $(\mathcal{V} \cup \Sigma)^*$ 字符串。
设 $\mathcal{C}$ 是一个约束集合,$\mathcal{V}$ 是一组基类型变量集合。定义 在类型变量和标签集合构成的两个字符串之间的关系 $(\mathcal{V} \cup \Sigma)^* \times (\mathcal{V} \cup \Sigma)^*$ 的一个子集 $S_\mathcal{C}$, 通过 $(Xu, Yv) \in S_\mathcal{C}$ 当且仅当 $\mathcal{C} ;\vdash; X.u {;\sqsubseteq;} Y.v$。 那么 $S_\mathcal{C}$ 是一个正则集合,并且可以在 $O(|\mathcal{C}|^3)$ 时间内构造一个识别 $S_\mathcal{C}$ 的自动机 $Q$。
证明:基本思想是将每个 $X.u {;\sqsubseteq;} Y.v \in \mathcal{C}$ 作为下推系统 $\mathcal{P}$ 中的一个转换规则 $\langle {X}; {u} \rangle \hookrightarrow \langle {Y}; {v} \rangle$。 此外,我们为每个 $X \in \mathcal{V}$ 添加控制状态 ${^#{Start}}, {^#{End}}$ 及其转换 $\langle {{^#{Start}}}; {X} \rangle \hookrightarrow \langle {X}; {\varepsilon} \rangle$ 和 $\langle {X}; {\varepsilon} \rangle \hookrightarrow \langle {{^#{End}}}; {X} \rangle$。 目前, 假设所有标签都是协变的,并且忽略规则 S-Pointer。 通过构造,$({^#{Start}}, Xu) \stackrel{}{\longrightarrow} ({^#{End}}, Yv)$ 在 $\mathcal{P}$ 中当且仅当 $\mathcal{C} ;\vdash; X.u {;\sqsubseteq;} Y.v$。 Büchi [27] 保证,对于任何标准(非无约束)下推系统中的两个控制状态 $A$ 和 $B$, 所有满足 $(A, u) \stackrel{}{\longrightarrow} (B, v)$ 的 $(u,v)$ 对组成的集合是一个正则语言; Caucal [8] 给出了一个构造识别这种语言的自动机的饱和算法。
在完整的证明中,我们增加了两个创新之处:首先,我们通过将variance数据编码到控制状态和转换规则中,支持逆变堆栈符号。 第二个创新之处涉及到 S-Pointer 规则;这个规则是有问题的,因为自然的编码将导致无限多的转换规则。 我们将 Caucal 的构造扩展为在饱和过程中懒惰实例化所有必要的 S-Pointer 应用。 详情见 Appendix D。
由于 $\mathcal{C}$ 通常涉及到无限多的约束, 这个定理特别有用:它告诉我们由 $\mathcal{C}$ 引发的完整约束集合可以通过自动机 $Q$ 的有限编码来实现。 对约束闭包的进一步操作,如有效的最小化,可以在 $Q$ 上进行。通过限制与 ${^#{Start}}$ 和 ${^#{End}}$ 的转换,使用相同的算法 消去类型变量,生成所需的约束简化。
推理的整体复杂性
用于执行约束集简化类型方案构造的饱和算法, 在最坏情况下,是关于简化子类型约束数量的三次方。由于一些著名的指针分析方法也具有三次方复杂度(如 Andersen [4]), 因此很自然地会怀疑 Retypd 的“无需指向”分析是否真的比基于指向分析数据的类型推理系统提供优势。
为了理解 Retypd 的效率所在,首先考虑 $O(n^3)$ 中的 $n$。 Retypd 的核心饱和算法在子类型约束的数量上是三次方的;由于机器代码指令的简单性,每条指令大约会产生一个子类型约束。 此外,Retypd 在每个独立的过程中应用约束简化以消除该过程局部的类型变量, 从而得到只涉及过程形参、全局变量和类型常量的约束集。在实践中,这些简化的约束集很小。
由于每个过程的约束集是独立简化的,因此三次方的 $n^3$ 因子由最大过程大小控制,而不是整个二进制文件的大小。 相比之下,像 Andersen 这样的源代码指向分析通常与指针变量的总数呈三次方,并且根据用于上下文敏感性的调用字符串深度呈
算法细节
约束简化算法(Appendix D)
基础符号
- $\amalg$ 表示集合的不交并。表示某个集合可以分割为不同的组成部分。
- $\mathcal{V} = \mathcal{V}_i \amalg \mathcal{V}_u$ 表示类型变量集合被分割为interesting和uninteresting两部分。
- 一个证明是elementary的,如果证明的结论的子类型关系里没有uninteresting的变量,且证明过程中,uninteresting变量都只在内部。
- $\mathcal{C} {;\vdash;}^{\mathcal{V}i}\text{elem} X.u {;\sqsubseteq;} Y.v$ 表示约束集合 $\mathcal{C}$ 上能够推理出这样一个子类型约束。其中类型变量都定义在 ${\mathcal{V}_i}$ 上,并且这样的关系是elementary的。
自动机
对应关系:
- 一个类型(sketch)就是一个有限状态自动机。
- 本来用树就够了,但是递归类型会导致无限长的树。根据子树的有限性,用自动机处理递归的情况。典型的例子是复杂的递归结构体类型。
- 下推自动机工作的过程就是我们类型推理的过程
- 当前状态表示基础的类型变量。
- 栈状态表示标签,比如
.load,field访问 - 自动机配置:状态+栈状态。表示一个派生变量。
- 状态转换规则:子类型关系。
- 比如,随便写一个规则 $a.\sigma\mathsf{N@k} \sqsubseteq b.load$ 表示可以从状态为 $a$ 栈内容为 $\sigma\mathsf{N@k}$ 的配置转换到 状态为 $b$ 栈内容为 $load$ 的配置。
- 可达性:派生的子类型关系。
- 然后,如果 $b.load$ 又是 $c$ 的子类型,两个规则合起来,在自动机上,状态 $a.\sigma\mathsf{N@k}$ 到 $c$ 也是可达的(走了两步)。因此也具有子类型关系。 $a.\sigma\mathsf{N@k} \sqsubseteq c$。
Transducer 与其构建
- Transducer可以表示下推自动机的所有的推断关系!任意两个dtv字符串之间的子类型关系!
- Transducer和类型推断的对应关系。
重要概念:
-
$\mathcal{P}_\mathcal{C}$ 表示我们这里构建的pushdown system。包含三部分 $(\widetilde{\mathcal{V}}, \widetilde{\Sigma}, \Delta)$
- 状态集合: $\widetilde{\mathcal{V}} = \left(\mathsf{lhs}(\mathcal{V}_i) \amalg \mathsf{rhs}(\mathcal{V}_i) \amalg \mathcal{V}_u\right) \times { \oplus, \ominus } \cup { {^#{Start}}, {^#{End}} }$
- 额外增加的两个特殊状态 start 和 end
- 带有variance标签的状态,包括三部分
- 带有L或R标签的interesting变量
- uninteresting变量
- 栈字符集: $\widetilde{\Sigma} = \Sigma \cup { v^\oplus
|v \in \mathcal{V}_i } \cup { v^\ominus|v \in \mathcal{V}_i }$- 包含普通的field label
- 带有variance标记的有趣变量。TODO这表示什么意思
- 转换规则包括四部分 $\Delta = \Delta_\mathcal{C} \amalg \Delta_\mathsf{ptr} \amalg \Delta_\mathsf{start} \amalg \Delta_\mathsf{end}$
- $\Delta_\mathcal{C}$ 现有的规则,经过rule函数转换后的结果
- $\Delta_\mathsf{ptr}$ PTR规则,经过rule函数转换后的结果
- $\Delta_\mathsf{start} = \left{\langle {{^#Start}}; {v^\oplus} \rangle \hookrightarrow \langle {v^\oplus_\mathsf{L}}; {\varepsilon} \rangle~|
v \in \mathcal{V}i \right} \cup \left{\langle {{^#Start}}; {v^\ominus} \rangle \hookrightarrow \langle {v^\ominus\mathsf{L}}; {\varepsilon} \rangle|~v \in \mathcal{V}_i \right}$- 表示start状态可以把栈上的唯一变量标签转换为当前状态,栈为空
- $\Delta_\mathsf{end} = \left{\langle {v^\oplus_\mathsf{R}}; {\varepsilon} \rangle \hookrightarrow \langle {{^#End}}; {v^\oplus} \rangle~|
v \in \mathcal{V}i \right} \cup \left{\langle {v^\ominus\mathsf{R}}; {\varepsilon} \rangle \hookrightarrow \langle {{^#End}}; {v^\ominus} \rangle|~v \in \mathcal{V}_i \right}$- 表示当前状态为某个变量,栈为空的时候,可以转换到End状态,把变量放到标签。
- 状态集合: $\widetilde{\mathcal{V}} = \left(\mathsf{lhs}(\mathcal{V}_i) \amalg \mathsf{rhs}(\mathcal{V}_i) \amalg \mathcal{V}_u\right) \times { \oplus, \ominus } \cup { {^#{Start}}, {^#{End}} }$
-
$\mathsf{Deriv}{\mathcal{P_C}}$ 表示 $\mathcal{P}\mathcal{C}$ 上派生得到的约束
-
$\mathsf{Deriv}{\mathcal{P_C}}' = \left{ (X.u, Y.v)
|(X^{\langle u \rangle}u, Y^{\langle v \rangle} v)\in \mathsf{Deriv}{\mathcal{P_C}}\right}$- 表示 $\mathcal{P}_\mathcal{C}$ 上删去variance标签得到的约束。
-
rule辅助函数,对普通的规则,生成我们内部使用的,带variance标签的规则形式
- $\mathsf{rule}^\oplus(p.u \sqsubseteq q.v) = \langle {\mathsf{lhs}(p)^{\langle u \rangle}}; {u} \rangle \hookrightarrow \langle {\mathsf{rhs}(q)^{\langle v \rangle}}; {v} \rangle \$
- 首先观察到分别给左边和后边的有趣的基本类型变量,通过lhs和rhs函数带上了L/R标记
- 其次将field label的variance标签标记到了类型变量上
- $\mathsf{rule}^\ominus(p.u \sqsubseteq q.v) = \langle {\mathsf{lhs}(p)^{\ominus \cdot \langle u \rangle}}; {u} \rangle \hookrightarrow \langle {\mathsf{rhs}(q)^{\ominus \cdot \langle v \rangle}}; {v} \rangle \$
- 这里的点运算符就是variance的叠加运算。
- TODO:这里的规则有什么实际的含义吗?
- $\mathsf{rules}(c) = { \mathsf{rule}^\oplus(c),~ \mathsf{rule}^\ominus(c)}$
- 表示对每个约束生成两种类型的约束,带有不同的variance标记。
- $\mathsf{rule}^\oplus(p.u \sqsubseteq q.v) = \langle {\mathsf{lhs}(p)^{\langle u \rangle}}; {u} \rangle \hookrightarrow \langle {\mathsf{rhs}(q)^{\langle v \rangle}}; {v} \rangle \$
-
状态上的variance标签的作用:控制状态上的 ${ \oplus, \ominus }$ 上标用于追踪栈状态的当前variance,这使得我们能够区分在协变和逆变位置使用公理的情况。
-
标签 操作 lhs 和 rhs 的作用:用于防止推导中使用来自 $\mathcal{V}i$ 的变量,防止 $\mathcal{P}\mathcal{C}$ 接受代表非基本证明的推导。
- 例如,我们写一个递归的无限约束 $var.load \sqsubseteq var$,推导为 $var.load.load \sqsubseteq var.load \sqsubseteq var$ ,在增加标签之后就变成了 $var_{L}.load \sqsubseteq var_{R}$ 从而不会被递归推导。
基于Transducer的约束简化算法包含四个步骤:
- 构建初始图
- 生成的约束可以直接看作PDS,这里的初始图表示未化简的transducer。
- Saturation。
- Tarjan's PathExpression 算法
- 转换回约束
Saturation算法
实际算法直接构建对应的,在边上标记有push/pop序列的自动机,即Transducer。然后在上面执行saturation算法。
- 基于约束集合构建初始图。子类型关系增加标记为1的边。对标签增加和减少的关系,增加对应push/pop的边。
- 规则左边存在的变量,标记pop边,右边的变量标记push边。
- 状态标记代表剩余的可读字符串,所以push之后反而变少,pop反而变多。
- 运行Saturation算法,
- 维护Reaching Set集合 $R(x)$
- 初始的时候,遍历所有边,如果存在一个
push l的边从 x 到 y 的边,则 $R(y) \leftarrow R(y) \cup {(l,x)}$ 从 x 节点 push l 可以来到 y 。即,只关注push边。 - 循环开始时,假如有子类型关系边 $(x, y, 1)$ ,则 $R(y) \leftarrow R(y) \cup R(x)$ 父类型更新子类型的可达关系。
- 初始的时候,遍历所有边,如果存在一个
- (循环内)Saturation规则:将
push α -> 1 -> pop a这种边序列增加shortcut边。即,如果存在边 $(x, y, pop;l)$ 且 x 的到达集合 $R(x)$ 内有一个对应标签的到达关系 $(l,z)$ 则给增加子类型关系边 $(z, y, 1)$。 - 同时考虑S-Pointer规则:如果有一个 $(.store, z) \in R(x)$,想象边从 z 到 x,上面标记push store。此时找到x的逆 variance 节点 $x^-$,然后给 $R(x^-)$ 增加 $(.load, z)$
- 直接应用: $(.load,;x.store) \in R(\overline{x})$ 不是最典型的例子。往往会结合之前新增的子类型边。
- 可以想象 $x$ 到 $x^-$ 额外增加了pop store和push load边。
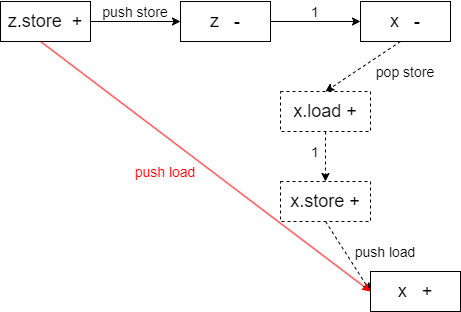
- 应用时最好 $\overline{x}$ 也存在在图上。
- 维护Reaching Set集合 $R(x)$
实际实现时,saturation算法被包含在Transducer的构建中。Transducer的构建在两个地方发挥作用:
- 约束的简化。
- 给sketch标记lattice元素时用来查询。
Tarjan’s path-expression algorithm 来自论文 《Fast Algorithms for Solving Path Problems》(see also this Github repo)。 在一个有向图中,求解一个源点到其他任意点的可能的路径构成的正则表达式。
在Saturation算法后,首先找到感兴趣的变量集合 $\mathcal{\epsilon}$ 然后找出所有开始并结束于 $\mathcal{\epsilon}$ 但是不经过 $\mathcal{\epsilon}$ 的路径表达式。然后和 $(recall;_)^(forget ;_)^$ 求交集(recall就是pop,forget就是push)。正则表达式也可以看作自动机,因此这里得到了一个新的自动机。
将自动机翻译为一系列子类型约束:首先将源点和目的点的基础类型变量,作为子类型关系变量的两侧。如果路径上遇到了forget标记,则在右侧增加label。遇到了recall,对应的label增加到左侧。如果存在通配关系,引入新的类型变量,表示为递归的约束。
将Transducer转换回约束(D.3 TypeScheme) 这里的算法D.3并不是直接被用。而是主要反映一个性质。上述 transducer 在构建时,我们理解为有一个隐藏的栈,会从状态push进去。这里仅仅是构建了一个完全对应的PDS,把这个栈显式地表示出来。
算法具体实现的时候,则是在前一步就找出从有趣变量到有趣变量的路径,然后直接把路径写成约束。
性质:最终得到的自动机Q有以下性质:
- 将 pop l 看作读取输入 l,push l 看作写出字符 l,1 看作空转换(ε)。则这个Transducer描述了PDS所有可能的派生关系,即所有可能的子类型关系。
- 如果在Q下,字符 Xu 能转换为 Yv,当且仅当X和Y是感兴趣变量,且存在一个基础的派生关系 $\mathcal{C} \vdash X.u \sqsubseteq Y.v$ 。
Sketches 构成的格
- sketch
- 定义1:sketch是一个带有标记的regular tree。
- 定义2:sketch可以被看作两个函数
- 前缀闭合的语言: $\mathcal{L}(S) \subseteq \Sigma^*$
- 从语言上的单词映射到lattice标记的函数 $\nu : S \to \Lambda$ ,例如 $\nu_S(w)$。
- 定义3:通过折叠sketch子树,sketch可以表示为一个有限状态自动机,每个状态标注了一个lattice元素 $\Lambda$ 。
- 这个自动机的每个状态都是接受态。因为语言是前缀闭合的。
- sketch的格结构。偏序关系写作 $X \trianglelefteq Y$
- 为sketch的树结构定义了 $\sqcup$ 和 $\sqcap$ 运算:在语言上分别是交和并。对应节点不变,或者根据variance在节点标记的格上做交或者并。
一个在变量集合V上的约束集合C的解,是一个变量到sketch的映射,满足:
- 如果是类型常量,则路径为空,lattice标记为常量
- 如果约束能推出 $X.v$ 存在,则v属于语言 $v \in \mathcal{L}(X)$
- 如果有子类型关系 $\mathcal{C} \vdash X.u \sqsubseteq Y.v$
- 对应的节点上的lattice标记也有偏序关系
- 对应的子树之间有sketch的偏序关系 $u^{-1} S_X \trianglelefteq v^{-1} S_Y$
sketch 和约束的对应关系很好。任何约束集合都能被一个sketch表示,只要没有证明出lattice标记上不可能的关系。
从约束构建sketches (E.1 InferShapes)
将子类型关系理解为等价关系。
- 为每个变量,以及前缀隐含的变量存在,创建节点。
- 构建图,边上标记field label的增加关系。
- 划分等价关系:
- 如果有子类型关系,则属于一个等价类。
- 如果因为子类型关系在没有函数调用时是结构化的,即形状上一致,父子类型可拥有的field label一致,因此这里的父子关系划分的等价类内部,只要有一个变量能有某个label,则类内每个变量都能有这个label。
- 等价类内两个变量,访问相同的标签得到的变量,(有子类型关系)也在同一个等价类内。
- 这个地方有点像Steensgaard的线性指针分析算法。
- 等价类内两个变量,一个访问load标签,一个访问store标签,得到的新变量也属于同一个等价类。
- 如果有子类型关系,则属于一个等价类。
- 计算每个等价类的形状,就是等价类内每个变量的sketch的形状。
算法中实际实现时使用的步骤
- Substitute
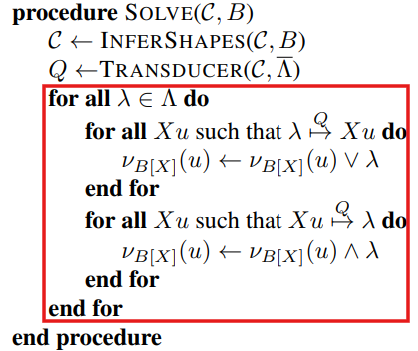
标记lattice元素 (F.2 Solve)
具体sketch上每个节点标什么lattice元素,借助了前面的transducer。关注所有的类型常量,然后看这个类型常量和哪些dtv有子类型关系,有则更新对应的lattice标记。根据子类型或父类型,取交或者并。
Tarjan Path Expression
基础符号
- $\epsilon(P(a,b))$ 从源点a到目标点b的路径表达式P(a,b),所表达的所有路径的集合。
- $\Lambda$ 表示空路径,源点和目的点为同一点时,为空路径。
定义
Q&A
Q1. 为什么实现的时候,那边先infer shapes然后才简化约束?那能不能直接不简化约束了,既然我本来就想要内部的变量
确实不应该这样?简化约束应当是最早的一步,然后才是type scheme。但是这并不代表简化约束是没有意义的。因为如果其他地方如果调用了这边的函数,会实例化约束。简化了还是有好处的。
从我的其他角度:
- 先infer shapes可以获取到小的内部变量的类型,不然后面这些变量被简化没了。
- sketches可以作为函数的简化版约束,用在增量运算。关联Q3
Q2. 为什么算法要后序遍历SCC?起到什么作用?
TODO
Q3. 给定一个SCC内所有函数的已经简化完的约束。开始分析另一个调用了已分析函数的SCC,是否会对之前函数的分析结果产生影响??
直观上看,函数就是函数本身,type schemes也就是一个函数到约束集合的映射,所以外部调用不会对函数类型有影响。细化到最具体的类型是后面考虑的事情。
如何证明?类型从形状和lattice两方面考虑。类型关系在函数调用的时候允许丢失一些能力(non-structural subtyping)。
Q4. 为什么只有函数调用的时候是non-structural subtyping?
可能一般以函数为单位做抽象?一般不会出现:函数内部一小块代码突然被看作更泛化的代码。
Q5. 如何将Sketch转换为普通类型?
从根节点出发,为所有可达路径构建path expression。?
Q6. 全局变量怎么处理?
- 全局变量被认为是参数和返回值的拓展?在分析时作为一个interesting的变量,从而在简化约束得到type scheme的时候,能够得到它和其他类型变量之间的关系?如果其他函数也用了同样的全局变量,就可以对接上。
- 全局变量可以看作一个无参函数?函数的type scheme是最简化的约束,假设存在任何调用者,也不因caller的调用而变化。这个角度考虑,如果看作一个无参函数,任何全局变量的类型都是一个无约束的自由类型变量。真正发挥作用的时候,仅仅是后面的附录G里面,根据使用细化类型的时候才真正产生类型。这个是不是就是retypd代码里的top down propagation?TODO
- 比如存在全局变量g,以及getter函数get_g和setter函数set_g。简化约束过程中,不推断G的类型。最后结束时根据使用会给G赋值一个最精确的类型。如果使用是通过get_g和set_g,则get_g因为使用获得的类型,能否从g顺着传播到set_g?
Q7. 约束的实例化是怎么做的?
- 在简化约束,求每个函数的type scheme时:
- 如果涉及的函数调用在SCC外,则根据调用点的不同,总是创建额外的实例。例如identity函数,函数内调用多次是不同的类型。
- 如果涉及的函数在SCC内。则不复制任何实例。TODO是这样吗?调研一下summary based analysis是如何处理递归和调用环的情况的。
另外,这说明提取约束时需要显式体现函数调用。可能可以为每个函数调用的约束增加一个调用地址标识。
Q8. 为什么要标记L和R?为什么构图时仅对左边的增加forget边,右边的变量仅增加recall边?能否证明,不标记L和R,仅仅限制路径探索不能再经过interesting的变量,即可得到相同的约束?如果不能,则得到的约束是否能用?
区分L/R以及仅对左边的增加forget边,右边的变量仅增加recall边,可以使得我们关注的变量不会存在于推导树内部。
推理关系和 proof tree 之间有对应关系。区分L和R的区别在于是否把L的变量当R的变量,从而递归推进了子类型关系。回忆elementary proof的定义,能否保证得到的约束关系的推导树,都没有感兴趣的变量在函数内部?
能否给出一个例子,使得某个saturation推导使得感兴趣的变量在推导树中间。
为了给出这样一个例子,首先回忆,为什么要简化类型约束。关键在于,是否任何原约束集合能推导出的关系,我们给出的简化的约束集合也能推导出来?
没有任何field label的F.in不能出现在该函数的子类型关系的子类型一方。同样,对应的F.out不能出现在子类型关系的父类型一方。
另外,如果一个变量仅出现在子类型关系左边(contra-variant时仅出现在右边)。不会出现反过来的情况,因此即使加上了这样的边也不会被用到。定理:如果有临时变量t,仅出现在子类型关系左边,证明不会有额外的边指向t,因此即使有边从t指向end,也不会被用到。证明:有边指向t有两种情况。第一种:构建图的时候有边指向。这种情况需要t在子类型关系右边,所以不成立。第二种,saturation时增加了边指向。根据saturation规则,仅有某个节点已经被某个pop边指向的时候,这个节点才会可能获得新增的1边。因为t没有其他边指向它,所以不成立。
Q9. 单个SCC内如何处理多态的类型关系?以及non-structural subtyping?
可以假设,能形成SCC的变量,不太可能有多态的类型关系,所以,就按照非多态的角度考虑?
TODO?这一块和full-context-sensitive的分析之间有点关系?
Q10. 为什么算法,在单个函数内关于指令是指令数的三次方的复杂度?
我们关注那个SCC的循环:生成约束的低于三次方。然后是对于每函数,这里还不是指令,不太算一个N。内部transducer函数构图,saturate,pathexpr算法。文章说saturate是主要的复杂度来源。
其实这里SCC构图之后,对每个普通的函数,已经可以做一些简单的优化了?比如一个base var没有其他的节点,然后仅有一个successor和predecessor,则可以消除。怎么有点像基本块的。
或者我可以把所有感兴趣的变量都区分L/R,先saturate一次,然后每次分析把图复制一份,merge其他的非感兴趣的图。
Q11. 函数内的类型分析算法是怎么做的?
首先,假如你已经有了被调函数的type schemes,type lattice,而且所有变量都是需要的,不需要简化。那么可以构建图,然后假设完全是non-structural subtyping,直接推导sketches。为了标记lattice,则需要构建transducer推导然后标记相关元素。
图算法基础
回顾之前的算法,我们先构建transducer图表示所有可能的子类型关系,然后饱和算法,再与productive语言相交。然后我们选择一系列感兴趣的变量,计算对应的路径表达式,然后再转换回约束。
为了将带有标记的图转换回约束,有两个相关的算法:
- 将有限状态自动机转换为正则表达式的算法。 我们构建图的时候其实是有起始态和结束态的。把它看作一个自动机,然后即可求解出对应的正则表达式。
- 对每个结束状态,从它开始,利用一系列规则归纳,归纳过程中允许边上直接标记为正则表达式,最后起始态和结束态会相邻。此时删除其他状态,并总结出对应的正则表达式。
- 最后将得到的多个正则表达式并起来。得到最终的表达式。
- (Tarjan's path expression算法)给定有向图,和图上的某个源点,求出源点到图上任意一个其他点之间的可达路径,所构成的表达式。
- 两个算法之间的关联:path expression算法会构建path sequence,缓存了子图的结果。而上面的表达式算法则没有这样做,因此path expression算法效率更高一些。(TODO 对吗?)
Tarjan's path expression算法
- "Fast Algorithms for Solving Path Problems"
- "A Unified Approach to Path Problems"
定义: 给定有向图 $G=(V, E)$ ,对于单源点 s 的路径表达式(path expression)问题是,对于任何顶点v,求解出一个无歧义的路径表达式 $P(s,v)$ 使得 它所表达的路径 $\sigma(P(s,v))$ 包含了所有的从s到v的路径。
注:
- 这里指的表达式就是由路径构成的正则表达式,包括$\cup$, $*$, $;\cdot;$(连接) 等特殊符号。
- 该问题还存在变种:single-sink,all-pairs
路径序列(Path Sequence): 一个有向图G的路径序列是一个序列 $(P_1,v_1,w_1), (P_2,v_2,w_2),...,(P_l,v_l,w_l)$ ,满足以下条件:
- 对于 $1 \le i \le l$ , $P_l$ 是一个无歧义的路径表达式,具有类型 $(v_i, w_i)$ (即该表达式表示从 $v_i$ 到 $w_i$ 的路径)
- (空路径)对于 $1 \le i \le l$ ,如果 $v_i = w_i$,则空路径 $\Lambda \in \sigma(P_i)$
- (非空路径)对于任何非空的路径p,存在一个唯一的下标序列 $1 \le i_1 \le i_2 \le ... \le i_k \le l$ 并且存在一个唯一的p的划分(不会划分出非空序列) $p=p_1,p_2,...,p_k$ 使得 $p_j \in \sigma(P_{i_j})$ 对于 $1 \le j \le k$。
如何理解非空路径条件? 图可以被分区为 $l$ 部分,且每个分区都按顺序有个编号。然后每条路径都可以被这些部分切分,但是可能不经过部分分区。这里经过了k个分区,编号依次是 $i_1,...,i_k$。让 $j$ 从1遍历到 $k$ ,每个分区内的路径 $p_j$ 是属于对应分区的路径表达式能够表达的所有路径集合 $\sigma(P_{i_j})$。
如何理解路径序列? 任何图上的路径需要被分解为路径序列。
- 比如我们可以构造一个路径序列,从图上任意点到任意点,则每个路径能直接找到对应。此时路径序列的顺序不重要。
- 对于有向无环图,每个边可以单独成为一个路径序列,因为这个边是连接这两个节点的唯一必经路径。每个路径可以直接分解为每条边,然后对应到路径序列中。。
- 对于强连通分量这种复杂情况,实在不行我们可以为里面任意两个点构建路径序列。如果有路径经过了强连通分量内部,如果能直接找到对应,则此时分量内部路径序列的顺序不重要。
Solve算法:给定一个路径序列,我们可以使用下面的传播算法解决单源点的路径表达式问题。
- 初始化:设置 $P(s,s) = \Lambda$ ,同时对每个不为s的顶点,初始化 $P(s,v) = \emptyset$
- 循环:让i从1到 $l$ (有 $l$ 个顶点)
- 如果 路径序列 $(P_i,v_i,w_i)$ 中的 $v_i = w_i$ , $P(s, v_i):= [P(s,v_i);\cdot;P_i]$
- 如果 $v_i \ne w_i$ ,$P(s,w_i) = [P(s,w_i)\cup[P(s,v_i);\cdot;P_i]]$
(这个算法基本上就是把路径连接起来。另外意味着我们需要按拓扑排序给节点一个编号)
路径表达式简化算法(方括号):
- 如果路径表达式 R 具有形式 $R_1 \cup R_2$ 则,
- 如果任意一边为空集合,则直接简化为另外一边
- 如果路径表达式具有形式 $R_1;\cdot;R_2$ 则
- 如果任意一边是空集,则直接返回空集
- 如果任意一边是空路径,则直接简化为另外一边
- 如果路径表达式具有形式 $R_1^*$
- 如果 $R_1$ 是空集或者空路径,则直接返回空路径
- 否则原样返回
使用Solve函数解决路径问题
- 对于单源点路径表达式问题(single-source path expression),我们构建Path Sequence然后调用Solve一次
- 对于所有节点对的路径表达式问题(all-pairs path expression),我们构建Path Sequence然后把每个点作为源点,调用Solve。
- 对于单目的点的路径表达式问题(single-sink path expression),我们构建一个边都是反向的图,然后转换为单源点的路径表达式问题。
Eliminate算法: 我们可以对任意的图构建路径序列。
- 初始化:
- $P(v, w):=\varnothing$ 任意两个顶点间都初始化为空集合
- 然后对每个边 $e \in E$ , 让路径表达式包含当前边 $P(h(e), t(e)):=[P(h(e), t(e)) \cup e]$
- 求解的主循环:
- 让v遍历每个节点序号1到n
- $P(v, v)=\left[P(\nu, v)^*\right]$
- 遍历每个 $u \gt v$ ,如果 $P(u, v) \neq \varnothing$
- $P(u, v):=[P(u, v) \cdot P(v, v)]$
- 遍历每个 $w \gt v$ ,如果 $P(v, w) \neq \varnothing$
- $P(u, w):=[P(u, w) \cup[P(u, v) \cdot P(v, w)]]$
- 让v遍历每个节点序号1到n
比如,如果一个有向无环图,按照拓扑排序编号,则 $u \gt v$ 时, $P(u, v)$ 必然为空,导致该算法无法进入循环,什么也做不了。但是实际上,初始化过程中,就已经完成了path sequence的构建了。因为有向无环图的路径序列就是每个边单独构成的序列。
Eliminate结果的顺序:Eliminate算法计算得到的结果,需要按照正确的顺序排列才能形成路径序列:
Theorem 4. Let $P(u, w)$ for $u, w \in V$ be the path expressions computed by ELIMINATE. Then the following sequence is a path sequence: the elements of ${(P(u, w), u, w) \mid P(u, w) \notin{\varnothing, \Lambda} ; and ; u \leq w}$ in increasing order on $u$, followed by the elements of ${(P(u, w), u, w) \mid P(u, w)=\varnothing ; and ; u>w}$ in decreasing order on $u$.
问题的分解: 为了提升Eliminate算法的效率,有两种方法,他们都对图进行分解。首先可以将图按强连通分量SCC分解。
有向无环图的路径序列: 首先将节点按照拓扑排序编号,可以直接得到集合 ${(e, h(e),t(e))|e\in E}$ 将这个集合中的点按照 $h(e)$ 升序排序,可以直接得到路径序列。
拓展到任意有向图: 对于有向图G,首先将图中的强连通分离凝结成单个点表示,则可以得到有向无环图,这些节点 $G_1,G_2,...,G_k$ 表示图G中的一个子图,编号按照拓扑排序。假设这些子图的路径表达式是 $X_1,...,X_k$ ,设 $Y_l$ 是序列 ${e,h(e),t(e)|h(e) \in G_l ; and ; t(e) \notin G_l}$ 任意排序(注意到 $Y_k$ 为空)。则 $X_1,Y_1,X_2,Y_2,...,X_{k-1},Y_{k-1},X_k$是G的一个路径序列。
与其他算法的关系
Retypd与现有指针分析的关系
Steensgaard 线性时间 指针分析
相关资料:
与 Anderson 指针分析的关系
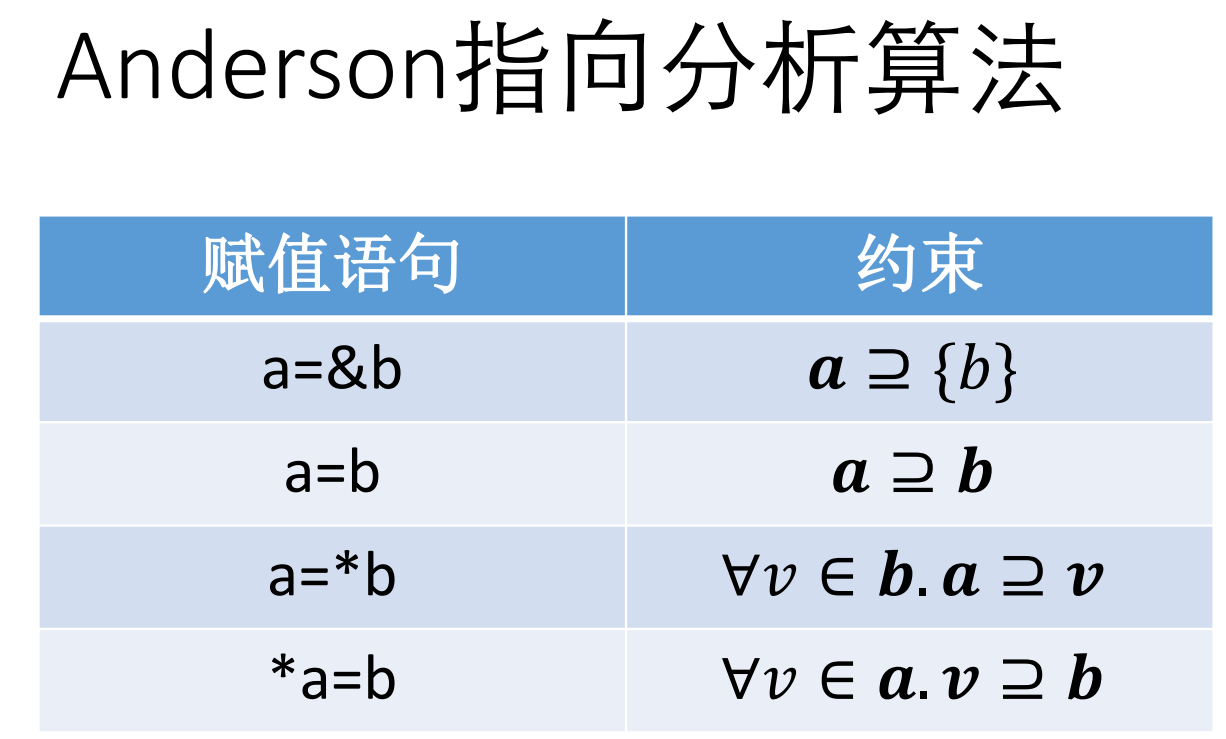
对应retypd论文中Constraint generation一节。
对于语句 q = &x,如何生成约束?有两种方式
- x是q加载后的子类型(提前假设q会被load): 生成
x <= q.load.off0@N - q存入值是x的子类型(提前假设q会被store):生成
q.store.off0@N <= x
需要考虑的问题是,立刻生成这两个约束,和维护一个指针分析,根据指针分析的结果生成这些约束。这两种方式是否有区别。
- 假如提前生成了这个约束,是否会产生什么额外的影响?
- 直观来说,额外生成的 q.load.off0@N q.store.off0@N 还能有谁指向吗?
- 如果Steensgaard指针分析能推断出指向关系,假如不产生指针分析的约束,原有类型系统是否依然能推断出来类型关系。
证明:
分每种语句考虑(TODO 证明 offset和load/store可以绑定/合并)
- 语句1:对于 x = &O1,对应
O1 <= x.load和x.store <= O1我们把指向关系定义为这两个关系的组合。 - 语句2:对于 y = x (x <= y),在retypd下有如下图结构:
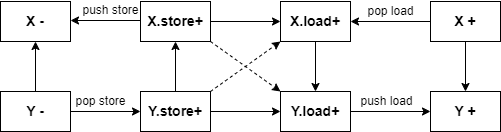
在指针分析中有如下约束: pts(x) $\subseteq$ pts(y) 我们尝试证明:
- 对于任何x可能指向的对象,y也会指向它。
- 1 已知 O1 <= x.load ,证明 O1 <= y.load:证:由 x.load <= y.load 显然 O1 <= x.load <= y.load
- 2 已知 x.store <= O1 ,证明 y.store <= O1:证:由y.store <= x.store 显然 y.store <= x.store <= O1
能否证明充要条件?如果存在 O1 <= x.load 和 x.store <= O1 则必然在Anderson指针分析中有 O1 $\in$ pts(x)
则我们可以证明,retypd是一种基于anderson指针分析的类型推断算法。
语句3:对于a = *b,有 b.load <= a
- 方式1 提前生成约束: 由归纳法,如果之前的其他语句都能够维持和指针分析等效的分析关系,当前语句依然能维持关系,则关系继续维持。
- 提前生成约束会额外生成约束: 对于任何 O $\in$ pts(b) 有 b.store <= O 似乎影响不大?
- 方式2 根据指针分析生成约束:对于任何 v $\in$ pts(b) ,生成/之前有 v <= b.load。因此有 v <= b.load <= a。对应 v $\subseteq$ a
语句4:对于*a = b,有 b <= a.store
-
根据指针分析生成约束:对于任何 v $\in$ pts(a) ,之前有 a.store <= v。所以有 b <= a.store <= v。对应 b $\subseteq$ v
-
saturation算法和Anderson指针分析算法求解时的异同。
-
retypd如果没有区分指针的load和store,是否依然和anderson指针分析一致?
- 不行,明显上面的证明是和load和store性质有很大关系的。
问题:offset和load/store可以绑定/合并
证明:首先.in 和.out只能在最外层。因此没有什么能够介入load/store中间。其次,每次load和store必然有offset和size。我们讨论某个变量的load和store的时候,本质上在讨论所有可能的offset和size之间的关系/对应的结构体类型。
结构体域敏感的指针分析
《Efficient Field-Sensitive Pointer Analysis for C》中提出了几种新的操作
实现 - 约束生成
基本运算
根据指令的依赖关系,自底向上处理指令,插入到指令到约束集合的集合。生成约束变量。
- 指针相关
- 存地址运算:由上面的证明,直接假设它之后会被load/store,生成两条约束。
- 变量赋值/数据流传递:对应子类型关系。
- 加法和减法约束
- 函数内是双向数据流分析,但是要和Summary-based analysis结合,无法求解的约束存到summary里尝试化简。
加减法约束
加减法约束的计算问题,其实是一个双向数据流分析问题。对应关系如下:
- 数据流流动关系,即SSA上的def-use关系,对应约束生成时的子类型关系,都是一种边。
- 指针类型关于子类型关系双向传递,子类型关系可以看作是数据流分析的边,加减法看作带有运算的基本块。然后基于worklist算法,递归应用约束,直到迭代到不动点。。
- 子类型关系。
因为本来就有基于类型的alias analysis。所以涉及指针的时候,类型分析和指针分析和别名分析真的有联系。
- 指针分析是别名分析的更精确版本。别名分析可以看作指针分析的应用。
- 类型分析需要随着指针指向去传播。
- 类型分析涉及指针时,不需要考虑流敏感性,上下文敏感性。
其他
SSA的静态分析和传统静态分析
- SSA的静态分析是在 SSA Edge ,即def-use chain上进行,遇到Phi指令merge结果。。
- 传统静态分析在CFG上进行,遇到控制流合并时merge结果。
静态分析之间的分层依赖
静态分析直接可能有依赖关系。比如指针和数字类型区分就被retypd类型恢复依赖,retypd进一步恢复指针的具体类型。
静态分析之间,是依赖关系还是更复杂的的关系。在于是否上层依赖的分析结果会反哺下层分析的结果。比如这里retypd如果恢复了更详细的具体类型,比如两个指针指向的结构体成员之间的复杂关系,那么这两个就有关系。。
问题:基于Steensgaard的线性时间指针分析算法的合并存储图,和retypd的sketches 等价图分析指针和数字类型,达到的精度是否相同?
答:应该是相同的。retypd的等价图构建后就等价是Steensgaard的存储关系图。
但是在跨函数分析框架下,这些具体分析都是一样地需要专门看待。。